Farm robots: Difference between revisions
No edit summary |
No edit summary |
||
| Line 8: | Line 8: | ||
|lifecycles = | |lifecycles = | ||
|tools = [[Wrenches]] | |tools = [[Wrenches]] | ||
|parts = [[Axial bearings]], [[Keyed shafts]], [[Shaft collars]], [[Gears | |parts = [[Axial bearings]], [[Keyed shafts]], [[Shaft collars]], [[Gears]], [[Sprockets]], [[Wheel hubs]], [[Frames]], [[Nuts]], [[Bolts]], [[End caps]], [[Solar panels]], [[Fluid pumps]] | ||
|techniques = [[Tri joints]], [[Wheels and axles]], [[Three point hitches]], [[Three point hitch receivers]] | |techniques = [[Tri joints]], [[Wheels and axles]], [[Three point hitches]], [[Three point hitch receivers]] | ||
|stl = | |stl = | ||
Revision as of 01:42, 16 June 2021

| Tools: | Wrenches |
|---|---|
| Parts: | Axial bearings, Keyed shafts, Shaft collars, Gears, Sprockets, Wheel hubs, Frames, Nuts, Bolts, End caps, Solar panels, Fluid pumps |
| Techniques: | Tri joints, Wheels and axles, Three point hitches, Three point hitch receivers |
Introduction
An agricultural robot is a robot deployed for agricultural purposes. The main area of application of robots in agriculture today is at the harvesting stage. Emerging applications of robots or drones in agriculture include weed control, cloud seeding, planting seeds, harvesting, environmental monitoring and soil analysis. According to Verified Market Research, the agricultural robots market is expected to reach $11.58 billion by 2025. Automating agricultural tasks such as weeding and pest control have the potential to unleash large amounts of human productivity.
Challenges
Agricultural tasks require a wide variety of manipulations, transformations, and even some object-recognition.
Approaches
Initial goal is to build a versatile general-purpose platform for solar-electric and solar-hydraulic-electric agricultural automation, with specific manipulators and tasks to follow.
-
Ken Isaacs pallet
-
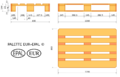
EUR pallet
-

Pallet
-

Three point hitch




- 4x BoTaiDaHong Electric Bicycle Motor MY1016Z 24V 350W DC ATV Electric Vehicle Gear Decelerate Brushed Motor with 9 Tooth Sprocket
- 8x Axial bearings
- 4x Keyed shafts
- 8x Shaft collars
- 4x Gears and sprockets
- 4x Wheel hubs
- Frames, Nuts, Bolts, End caps
- Solar panels
- Mophorn Hydraulic Power Unit 6 Way 6 Quart Hydraulic Pump Double Acting Hydraulic Power Unit 12V DC Dump Trailer Car Remote with Plastic Oil Reservoir (Plastic, Double Acting)
Fruit harvesting
- OAK spacial AI powered by OpenCV
- identify fruit
- open gripper
- position gripper
- close gripper
- twist gripper
- return fruit to collection
- open gripper