Farm robots: Difference between revisions
From
No edit summary |
No edit summary |
||
| Line 3: | Line 3: | ||
|designer = [[User:Tim|Timothy Schmidt]] | |designer = [[User:Tim|Timothy Schmidt]] | ||
|date = 2021 | |date = 2021 | ||
|vitamins = | |||
|materials = | |||
|transformations = | |||
|lifecycles = | |||
|tools = [[Wrenches]] | |tools = [[Wrenches]] | ||
|parts = [[Axial bearings]], [[Keyed shafts]], [[Shaft collars]], [[Gears and sprockets]], [[Wheel adapters]], [[Frames]], [[Nuts]], [[Bolts]], [[End caps]], [[Solar panels]], [[Fluid pumps]] | |parts = [[Axial bearings]], [[Keyed shafts]], [[Shaft collars]], [[Gears and sprockets]], [[Wheel adapters]], [[Frames]], [[Nuts]], [[Bolts]], [[End caps]], [[Solar panels]], [[Fluid pumps]] | ||
Revision as of 03:54, 25 May 2021
Project: Farm robots

| Tools: | Wrenches |
|---|---|
| Parts: | Axial bearings, Keyed shafts, Shaft collars, Gears and sprockets, Wheel adapters, Frames, Nuts, Bolts, End caps, Solar panels, Fluid pumps |
| Techniques: | Tri joints, Go kart drives, Three point hitches, Three point hitch receivers |
Introduction
Automating agricultural tasks such as weeding and pest control have the potential to unleash large amounts of human productivity.
Challenges
Agricultural tasks require a wide variety of manipulations, transformations, and even some object-recognition.
Approaches
Initial goal is to build a versatile general-purpose platform for solar-electric and solar-hydraulic-electric agricultural automation, with specific manipulators and tasks to follow.
-
Ken Isaacs pallet
-
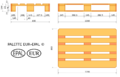
EUR pallet
-

Pallet
-

Three point hitch




- 4x BoTaiDaHong Electric Bicycle Motor MY1016Z 24V 350W DC ATV Electric Vehicle Gear Decelerate Brushed Motor with 9 Tooth Sprocket
- 8x Axial bearings
- 4x Keyed shafts
- 8x Shaft collars
- 4x Gears and sprockets
- 4x Wheel adapters
- Frames, Nuts, Bolts, End caps
- Solar panels
- Mophorn Hydraulic Power Unit 6 Way 6 Quart Hydraulic Pump Double Acting Hydraulic Power Unit 12V DC Dump Trailer Car Remote with Plastic Oil Reservoir (Plastic, Double Acting)
Fruit harvesting
- OAK spacial AI powered by OpenCV
- identify fruit
- open gripper
- position gripper
- close gripper
- twist gripper
- return fruit to collection
- open gripper
Software
References